
Home » Supported Research » Image guided robotic nephron-sparing surgery
Image guided robotic nephron-sparing surgery
 Title:
Title:
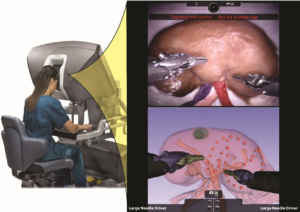
Image guided robotic nephron-sparing surgery
Project Number:
5R01EB023717-04
Contact PI/Project Lead:
Robert Webster
Award Organization:
National Institutes of Health
Abstract:
The importance of preserving renal function during surgical interventions through nephron-sparing (“partial nephrectomy”) surgical techniques has garnered considerable and growing recent recognition. Total kidney removal (“radical nephrectomy”) permanently compromises renal function and leads to increased morbidity and mortality, with substantial negative impact on long-term patient quality of life. In contrast, partial nephrectomy improves long-term outcomes by sparing a maximal amount of healthy kidney tissue. However, minimally invasive partial nephrectomy is rarely attempted because it is extremely challenging to accomplish. The surgeon must make critical intraoperative decisions (which can mean life or death for the patient), based on imprecisely mentally inferred and registered three-dimensional anatomical relationships. The surgeon must view a series of 2D preoperative images and build a mental 3D model of patient anatomy. He/she must then intraoperatively guess how this remembered anatomical map should be registered to the patient. The inherent inaccuracies in this process prevent many surgeons from attempting minimally invasive partial nephrectomy, since positive margins (or inadvertent damage to internal kidney structures) are disastrous outcomes, while taking a large negative margin defeats the purpose of the partial nephrectomy procedure. Our overall goal is to create an image-guided surgical system that makes localization, dissection, and isolation of critical vascular and organ structures, as well as correct margin selection, easier and more accurate for the surgeon (and thus the procedure safer and more effective for the patient), thereby increasing the number of surgeons and hospitals able to adopt nephron sparing techniques. Toward this goal, our specific objective in this proposal is to test the hypothesis that image guidance can increase the accuracy and/or time- efficiency of the surgery. To test this hypothesis, we propose three Specific Aims: Aim 1 implements image guidance on the da Vinci surgical robot platform. Aim 2 addresses extensive phantom validation studies using anatomically accurate synthetic organs with realistic material properties. Aim 3 consists of an in vivo human subject pilot study we call a “bystander study” because it can be achieved with essentially zero risk to human subjects. The endpoint of this R01 will be a fully validated system, and the necessary experimental data to power a large-scale clinical comparative efficacy study. This study will be able to take place soon after the conclusion of this R01, due to the wide availability of the da Vinci robot, and the fact that all a surgeon or hospital must have to participate is the robot itself – no additional pieces of equipment or infrastructural changes will be necessary.