
Home » Supported Research » Relating vigilance to connectivity and neurocognition in temporal lobe epilepsy
Relating vigilance to connectivity and neurocognition in temporal lobe epilepsy
Title: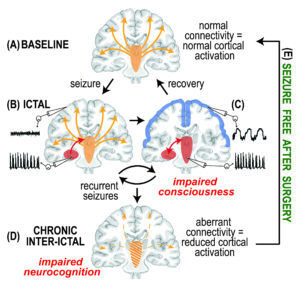
Relating vigilance to connectivity and neurocognition in temporal lobe epilepsy
Project Number:
5R01NS112252-02
Contact PI/Project Lead:
Dario Englot
Award Organization:
National Institutes of Health
Abstract:
Temporal lobe epilepsy (TLE) is a devastating and common neurological disorder in which patients suffer from frequent consciousness-impairing seizures, broad neurocognitive deficits, and diminished quality of life. Given that seizures originate focally in the hippocampus or amygdala, why do TLE patients demonstrate cognitive deficits not associated with temporal lobe function – such as decline in executive function, cognitive processing speed, and attention – as well as diffuse decreases in neocortical metabolism and functional connectivity? Given prior observations of reduced vigilance levels in TLE, and that seizures may disrupt the activity and long- range connectivity of subcortical brain structures involved in vigilance regulation, we propose that subcortical activating networks underlying vigilance play a critical role in mediating the widespread neural and cognitive effects of focal TLE. Specifically, our central hypothesis is that recurrent consciousness-impairing seizures in TLE may lead to functional connectivity disturbances between subcortical vigilance centers and cortex, leading to impairments in vigilance state that may contribute to neurocognitive problems not explained by temporal lobe dysfunction. To address this hypothesis, we plan human neuroimaging studies that relate vigilance to brain connectivity (Aim 1), cognition to vigilance (Aim 2), and connectivity to cognition (Aim 3). In Aim 1, we will characterize vigilance-dependent functional connectivity in healthy controls using simultaneous fMRI-EEG, which will guide the selection of subcortical-cortical connections to probe in patients (Aim 3). In Aim 2, we will relate individual neurocognitive parameters to vigilance measures in patients and controls, using a full neuropsychological evaluation and assessments of psychomotor speed and excessive sleepiness, to determine which cognitive deficits in patients are related to impaired vigilance. In Aim 3, we will compare MRI measures of subcortical-cortical connectivity in patients vs. controls (focusing on areas uncovered in Aim 1) to examine how long-range connections from subcortical activating structures are perturbed in TLE, and we will relate these connectivity disturbances to neurocognitive deficits. Using this novel approach that integrates multi-modal imaging with in-depth neurocognitive assessments, we expect to identify vigilance center connectivity perturbations in TLE that influence vigilance state and may contribute to neurocognitive decline. This work may help uncover subcortical neuromodulation targets and suggest the need for earlier surgical intervention and behavioral therapies in this devastating disorder.